
「CEATEC 2020 ONLINE」でコンピュータサイエンス学部「ラボ」の研究成果を発表
■AI、IoT、データサイエンス、UIなど産学連携による新たな価値創造へ
東京工科大学(東京都八王子市、学長:大山恭弘)コンピュータサイエンス学部では、企業等と連携しながら新しい価値創造に取り組む組織「ラボ制度」を導入しています。この最新の成果などを、10月20日(火)?23日(金)に開催される「CEATEC 2020 ONLINE」にて発表いたします。
同ラボでは、コンピュータサイエンス、アントレプレナーなど各分野の専門家である複数の教員と企業などの産業界が連携し、学術研究にとどまらない社会的な価値創造を試みる体制を構築し、種々のプロジェクトを実施しています。代表的なものとして、金融分野などの実践的なデータサイエンスに取り組む「データサイエンス?ラボ」、生物の知能に近い認知機能をロボットを用いて実現することを目指す「コグニティブ?ロボティクス?ラボ」、人間とコンピュータの新しい関係の構築を試みる「ヒューマン?コンピュータ?インタラクション?ラボ」等があります。さらに、実学ラボ、システムインフララボ等も今後計画されています。
本展では、各ラボや教員が運営するプロジェクトに関して、オンラインの講義動画で最新の研究成果を発表するほか、同学部が取り組む価値創造人材育成をはじめとする新たな実学教育について動画で紹介します。
【出展概要】
出展イベント: CEATEC 2020 ONLINE(出展エリア:Co-Creation PARK)
会 期:10月20日(火)~23日(金)
展示URL: https://online.ceatec.com/event/92/product/1934(研究展示紹介ページ)
https://online.ceatec.com/event/92/booth/1249(コンピュータサイエンス学部ページ)
入 場: 無料 ※オンラインでの登録が必要です
内 容: オンライン動画(オンデマンド)によるプレゼンテーション
?コンピュータサイエンス学部の価値創造人材育成カリキュラム等の紹介
?4つの「ラボ」プロジェクトの最新研究紹介 ※詳細は下記参照

■【ラボのプロジェクト例】
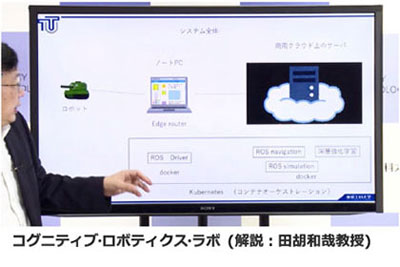
▼クラウド上の高度なAIをロボットで実現(コグニティブ ロボティクス ラボ)
コネクテッドカーや次世代家電、インダストリー4.0といったIoT環境の変化を背景に、クラウド上の大規模かつ高度なAIと種々の機械を接続する「フォグコンピューティング」などの技術への注目が高まっています。
本プロジェクトでは、コンシューマデバイスを活用した安価なロボットのプロトタイプを制作し、これらをロボット向けミドルウェアである「ROS(Robot Operating System)」、仮想化技術であるコンテナの管理ツール「kubernetes(クバネテス)」および「docker(ドッカー)」を用いてクラウド上で制御できるシステム全体の開発を進めています。これを応用し、生物の知能に近い次世代の高度AI構築も試みています。
【研究紹介動画の配信時間:00分00秒~19分30分】

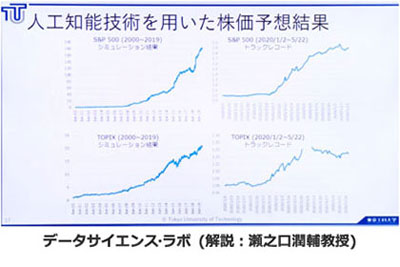
▼AIによる株価予想モデルを産学連携で開発(データサイエンス ラボ)
株価な株価などの金融市場やウイルスの感染経路といった集団行動など、AI技術による未来予想の研究プロジェクト。現在注力している「株価予想」のAI解析モデルは、実際に大手金融関連企業などでも活用されており、
これらと連携しながら開発が進められています。既存のAI投資信託商品で採用している複雑系のデータ予想モデルでは、テストデータと訓練データの一致度が低いといった課題がありましたが、本研究ではよりコアの構造を捉えるシンプルなモデルをベースに、2段階の進化系計算(Bi-Lebel GA)などを用いて最適な機械学習の「決定木」を探索する手法を用いることで、より高い精度での予想に成功しています。
【研究紹介動画の配信時間:19分30秒~51分00秒】

▼変形するゲームコントローラ(ヒューマン?コンピュータ?インタラクション ラボ)
VRコンテンツや心理?感情の評価手法の開発など人間とコンピュータの新しい関係の構築を試みるプロジェクト。その一例として、従来の汎用ゲームパッドとアイテム専用コントローラの特性を併せ持ち、現実と仮想世
界との一体感を高めることを目的とした、変形するゲームコントローラ「SHAPIO」を紹介。形状を変化させることで、1つのコントローラで剣や銃、弓矢といった様々なアイテムを操作でき、「剣が折れる」などゲーム上での形状変化に合わせてコントローラ自身も変形する機構を、モーターやセンサー、無線チップなどを組み込んだモジュールユニットを組み合わせることで実現しています。
【研究紹介動画の配信時間:51分00秒~1時間13分00秒】

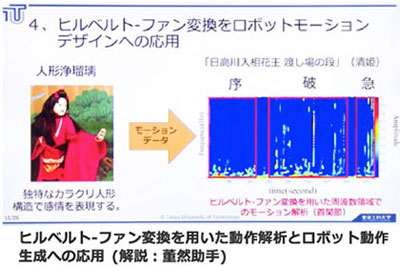
▼人形浄瑠璃の感情表現をAIロボットで再現(ヒルベルト-ファン変換を用いた動作解析とロボット動作生成への応用)
瞬時周波数領域でモーションデータを解析する「ヒルベルト‐ファン変換(Hilbert-Huang Transform)」技術を応用したプロジェクト。人形浄瑠璃などの伝統芸能における「序破急」(動きの緩急)といった特有の感情表現
の動作を同技術で解析し、深層学習の学習用データを作成、AIロボットの動作生成に反映する取り組みを行っています。このような人間との信頼感の獲得に重要な人工感情(AE)のデザイン手法の確立は、将来のホームロボットの普及に向け不可欠とされています。また、ゴルフスイングなどの素早い身体の動きを解析するティーチング支援、アニメーション制作の高度なモーション編集を簡単にできるツール開発などにも応用が期待されます。
【研究紹介動画の配信時間:1時間13分00秒~1時間31分15秒】

コンピュータサイエンス学部WEB:
/gakubu/cs/index.html