
「かっこいいは正義! 面白いは原動力!」をモットーに、AIやロボット、自動運転の研究をしています
2023年1月13日掲出
コンピュータサイエンス学部 人工知能専攻 服部聖彦 教授

ガンダムに憧れて、大学ではロボットを学べる機械制御工学科に進んだという服部先生。やがてその興味は、ロボットの頭脳であるコンピュータの分野へと広がります。大学院で自然界の“群れの知能”に着目した研究を始め、現在はそれをロボットやスマートフォンの制御に応用した研究に取り組まれています。今回は、いくつかの研究を取り上げて、お話しいただきました。
■先生が指導されている「群知能?自律分散システム研究室」では、どのようなことに取り組んでいるのですか?
複数の個体を協調させて賢く動かすことです。複数のコンピュータやロボット、スマートフォンが協力することで、1個体では達成できない難しい問題を解決しようというテーマで、研究に取り組んでいます。扱っている研究は、4足ロボットや宇宙ロボット、自動運転など幅広くありますが、いずれも自律移動体が関係している研究で、それを軸に展開している形です。
(研究を進める上で作成したり,使用しているロボット)

元々、私は群知能や群ロボット、マルチエージェントの研究をしてきました。自律意思決定主体が複数いた場合に、どのように協力すれば全体としてより良い結果が出せるかという研究です。一例を挙げると、災害時に避難誘導があります。災害という非常事態において、どのような誘導や案内があれば安全に人々が避難できるでしょうか? 社会活動は人間という自律的に考えるものの集合体ですから、その人間の行動、思考モデルをコンピュータ上で表現できれば、集団や社会、市場?マーケットなどをコンピュータ上に再現して自由に実験できるのです。
昔はそういう社会実験は統計モデルで計算していましたが、それでは人間のような複雑な思考の実装が難しく、うまく捉えることができませんでした。しかし近年、コンピュータの性能が飛躍的に向上したことにより、各個体に人間のような行動を振る舞わせることができるようになりました。その結果、高性能コンピュータを用いてコンピュータの中に人工的な社会や市場?マーケットのシミュレーションを作成し、より現実に近い挙動を見てみようという研究が進んできたのです。例えば、株の値段が下がったら買う、上がったら売るという単純なルールをコンピュータでシミュレーションすると、個々の動きは単純でもそれらが集まると、非常に大きな波ができてきます。同じことが自然界にも見られ、魚の群れや鳥の群れなどは、その好例です。そこで得られた知見は、コンピュータグラフィックスやロボット、ドローンの制御などに広く応用されていますし、私自身もそういう研究に取り組んできました。
■具体的な研究例には、どのようなものがありますか?
最近取り組んでいる研究の一つに車の自動運転の研究があります。自動運転とは、車がセンサやナビゲーションに従って自律で状況を判断し、ブレーキやアクセルを制御するということで、簡単に言えば、車がロボット化するということです。近い将来、あらゆる車が自動運転になれば、日本中に1億台のロボットが新たに出現することになります。そうなったとき、ロボット同士が互いに連携し、どのように協調して制御し合うのかということが重要になってきます。そこで、今、私の研究室では、「レーンレス自動運転」の研究に取り組んでいます。
(学習初期.AIが試行錯誤で運転方法を模索中)
このシミュレーションで動いている車は、車自身が他車と接触しないよう、自分で運転方法を発見していきます。ですから私がプログラムしたものではなく、それぞれの車が試行錯誤して、どう走れば良いかを発見しながら走っているのです。これには近年着目されている深層強化学習を用いており、車は壁や他車にぶつからずに、速く走ることができればより多くの報酬をもらえるという仕組みになっています。車(コンピュータ)は、1番たくさん報酬をもらえる方法を自分で学習、発見しながら走るのです。最初はうまくいきませんが、学習が進むにつれてスムーズになり、後期にはかなり混雑した状況でも上手に走るようになってきます。
(学習後期.AI自身が発見した運転方法を用いて自動車を運転中)
この研究では、今後も深層強化学習を続けていくことはもちろん、どういったセンサがあればより効率が上がるか、また、現状は車の形やサイズが同じなので、それらを変えた場合はどうなるかなど、色々な状況下で効率的に運転できる方法を学習させたいと思っています。
市販のロボットを用いた「信号レス交差点」の研究にも取り組んできました。現在は、そのロボットを使って渋滞回避の研究を進めています。車がどの道を走っているのかを通信して、後続車はその情報から混んでいる道を避ける判断をし、渋滞を回避させるということに取り組んでいます。
(実ロボットを用いた自律制御による渋滞回避)
究極的には、このロボットに「レーンレス自動運転」の深層強化学習でシミュレーションして学んだものを入れて実験したいと思っています。つまりシミュレーションと実機の研究を将来的に統合していくつもりです。 ただ、実際のロボットでの研究では、色々な難しい問題が出てきています。通信エラーやセンサエラーなど様々なエラーが出てくるので、そこをどう解決するのかという問題はありますね。一般的なシミュレーションではそういったエラーがない前提で行っているので。ですから実機で検証して動かせるところまで持っていけたら良いなと思っています。 先に説明したのは実機を用いた信号レス交差点の研究ですが、シミュレーションを用いた研究を行っております。この研究では、自動運転車が交差点に進入する時に、各車の位置、速度、目的を取得したサーバが信号を使わずに、最適な経路を各車に指示します。具体的には、仮想的な壁であるVirtual Wallというものを設置し、各車をVirtual Wallをよけつつ最短で目的に到達する経路を選んで移動するだけです。このような簡単な仕組みにも関わらず、信号や一時停止がなくても安全かつ効率的に全体を制御できるのです。
(路車間通信を用いた交差点での自動車制御)
■学生が取り組んでいる研究についてもお聞かせください。
私の研究室は「かっこいいは正義! 面白いは原動力!」がキャッチフレーズですから、基本的に私の指導できる範囲であれば、学生自身が面白いと思ったことや好きなことを研究テーマにして良いということで進めています。例えば、今、卒業研究として「超臨場感マルチモーダルVR」の開発に取り組んでいる学生がいます。マルチモーダルとは、例えば視覚と触覚というような複数感覚器に対して情報を伝達することで、これにより臨場感を強く感じるということが分かってきました。この学生は車の運転が好きで、マルチモーダルを積極的に活用して運転のスピード感を感じられる、つまり風を感じられるVRをつくろうと取り組んでいるところです。例えば、オープンカーに乗っていると、スピードによって風の強さが変わりますよね。また、カーブを走るときは正面ではなく、側面から風が来ます。そういうことを全てプログラムで制御しようというのです。
(VR画像,6軸センサ,マイコン,ファンを用いたマルチモーダルVRシステム)

具体的には、VRで車が走っているときの風景動画を映し、その動画のスピードや方向に合わせて、風の強弱をコントロールすることで視覚+触覚の両方に刺激を与えます。実験ではOculus QuestというVR機器とUnityという3D物理演算ソフトウェア、Arduinoマイコンで風を起こすファンを制御しています。それにより、映像という視覚に、風という触覚の情報を同時に与えることで、没入感や臨場感が高くなるのではないかという研究をしています。
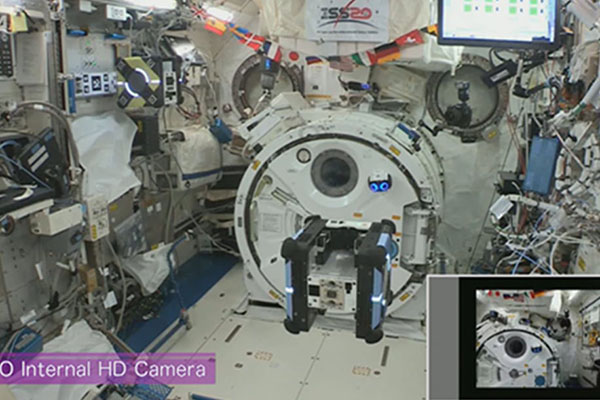
研究室を中心に、学部の有志の学生たちと取り組んでいるプロジェクトもあります。JAXAが3年前から始めたコンペティション「Kibo-RPC」は、国際宇宙ステーションISS内を自律移動するロボットの移動精度を競うというもので、私の研究室では初年度から参加しています。過去3回参加した内の2回は、入賞も果たしました。
また、「自動運転AIチャレンジ」というコンペティションにも今年から参加しています。ちょうどこの研究室の学生が取り組んでいるテーマで、自動運転の精度を競うものです。これは初参加ですのでまだ手探り状態ではありますが、今後も継続してチャレンジしていきます。
■今後の展望をお聞かせください。
工科大ロケットチームの結成を目指しています。私は前任校にいた2004年からARLISS(A Rocket Launch for International Student Satellites)というアメリカのネバダ州、ブラックロック砂漠で行われる、小型人工衛星の打ち上げ競技会に参加してきました。この競技会ではロケットの中に学生たちが制作したロボットを入れて4000メートル上空まで打ち上げ、そこで放出されたロボットが、自律制御でゴール地点までたどり着けるかを競うコンペで、過去に何度も優勝経験があります。本学に着任した2020年はコロナ禍で大会自体が中止となり、チームの立ち上げができませんでしたが、ようやくコロナも落ち着きつつあるようなので、今後、工科大チームを立ち上げて、ロケットを打ち上げたいというのが、現在の目標です。

■先生はどういう経緯で今の研究を始めたのですか? また研究の面白さとは?
元々はロボットに興味があり、機械制御科でロボットの勉強をしていました。学ぶうちにロボットも面白いけれど、コンピュータも面白いと思うようになり、大学院では進路変更をしてコンピュータ系に進んだのです。そのときに所属した研究室は、魚の群れの研究をしているところでした。魚の群れは賢くて、捕食者に襲われた時、色々な逃げ方をします。状況に合わせて色々な回避行動をするのです。私はどのような条件において、どういう回避行動をするのかということに関心があって、それを調べてみたいと思ったのです。魚群のすごいところは、群れにリーダーがいるわけではなく、各魚が勝手に、ある単純なルールに従って行動した結果として、全体で見るとあたかもコントロールされたような現象が起きているという点です。そこにとても興味を持って調べていくうちに、現在のテーマである自律分散協調に関する研究を始めました。研究は、面白いと思うことに取り組めるところが醍醐味のように思います。研究者や教員は、“面白い”をモチベーションにできる数少ない職業です。普通、仕事というと、利益が出るかが一番重要とされると思います。ですが研究者や教員は、「面白いからする」と堂々と言える職業だと思います。それは、ある意味で大学という守られた環境にあるからとも言えますが、私はやはり“面白い”をモチベーションに生きていきたいです。
また、教員の醍醐味の一つとして学生の成長に触れられることが挙げられます。最初は私の指示に従って、嫌々研究に取り組んでいたような学生がだんだんと自身の研究の面白さに気づき、目の色が変わってくるのを目の当たりにできる喜びがあります。学生が自分でどんどん研究を進めて、すごく嬉しそうに報告してくれると、この上なく嬉しく思います。
■最後に受験生?高校生へのメッセージをお願いします。
大学では、何か夢中になって自分でつくるという経験をしてもらいたいですね。ソフトウェア、ハードウェア、アイデア、ビジネス、創作…、何でも良いので、ぜひ価値をつくることに取り組んでみてください。というのもこれからの時代、言われたことをするだけでは十分ではありません。その人にしかできない、何かしらの価値をつくり出せる人が重宝されるようになってきます。単に頑張って勉強しました、言われた通りのことができましたという人が社会で輝くには、なかなか厳しい時代だと言えるでしょう。ですから、大学時代の経験を通して、自分は何ができるのか、どんなことに自信があるのかを語れる人になってください。そういう社会に出るためのセルフブランディングを意識してほしいです。私は教員としてそれが育めるようなチャンスを学生にたくさん与えたいと思っていますし、大学としても色々と用意していますので、自分から何かしら興味のあることに挑戦してみてください。
■コンピュータサイエンス学部:
/gakubu/cs/index.html
/gakubu/cs/index.html