
人間が自然に行っている効率的な動きをロボットでも実現したい!
工学部 機械工学科 関口暁宣 講師
「ロボットや機械を制御して、思い通りに動かせたら面白そう」と、大学では機械系の学科を選んだという関口先生。ロボットに人間のような自然で効率的な動きをさせる研究に取り組んでいます。今回は先生の研究室での取り組みについてお聞きしました。
■先生の研究室「ロボットモーション研究室」では、どのような研究に取り組んでいるのですか?
人間の動作や情報処理のメカニズムを計測したり分析したりして、人のそばで暮らしを助けるロボットやメカトロニクスシステムに活かそうと取り組んでいます。例えば、二足歩行ロボット(ヒューマノイドロボット)を、人間の歩行と同じように歩かせようと試みている研究があります。人の歩行とヒューマノイドロボットの歩行には、多くの違いがあります。中でも特に大きな違いとして挙げられるのが、人は膝を伸ばした状態も使って歩行することや、つま先を使って蹴り出したり足の柔らかさをうまく変えたりしながら歩くということです。そういう特徴をヒューマノイドロボットにも取り入れて、ロボットの歩行の性能を向上させたり改良したり、平地ではない、歩きにくい場所でもうまく歩かせられるようにしたいと思っています。
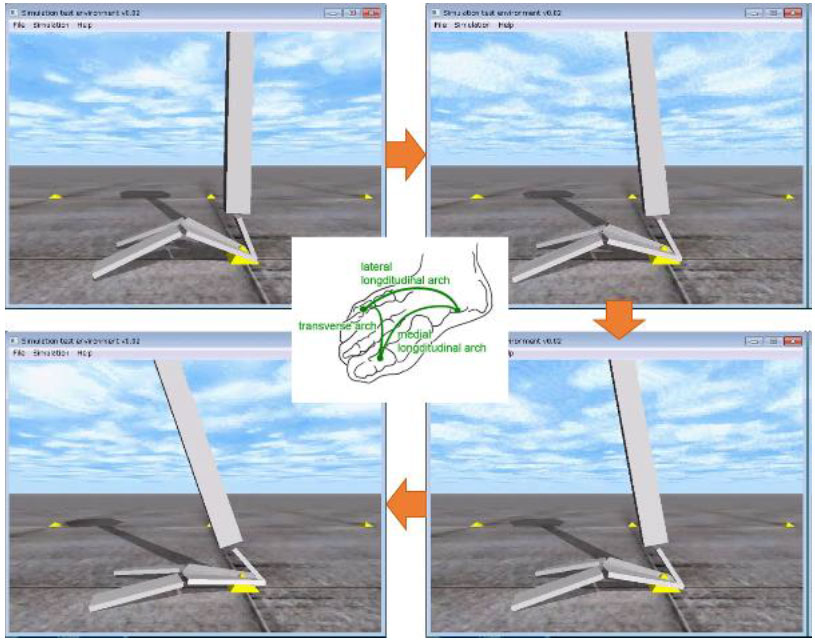
そのためのひとつの方法として、注目しているのが人間の足にあるアーチ構造です。このアーチ構造は、歩行時の衝撃吸収やつま先を使った蹴り出し動作、重心移動に役立っています。逆にロボットの足の裏は平らな構造のものが多く、それが人間らしい動きを実現しにくくしているのではないかと考えられます。そこで人間の足のアーチ構造をモデル化した足をロボットにつけたとき、それがロボットの歩行時の足の動きにどう影響するかということを、簡単なモデルを使ってシミュレーションして調べています。今後は、実際の歩行のシミュレーションや試作した実機を使って実験しようと計画しています。
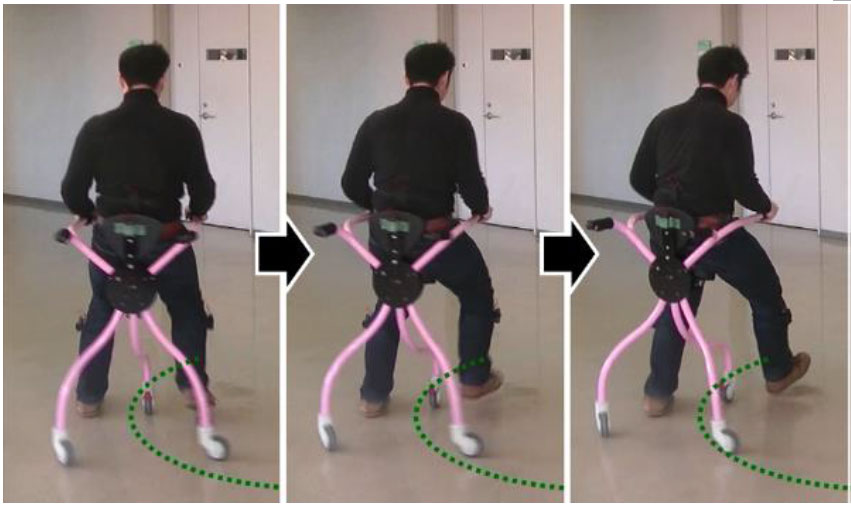
また、3輪型歩行補助器「楽WALK」(らくウォーク)の分析にも取り組んできました。これは八王子市にある菊池製作所と共同で進めてきた研究です。菊池製作所で開発された「楽WALK」は、お年寄りや足?膝が弱っている方の歩行を助けるための3輪型歩行補助器で、サドルに腰かけて自分で足を動かして進むというものです。この試作機を使用したときの人の歩き方をモーションセンサなどで計測?分析し、「楽WALK」を使わないときの歩き方と何がどう違うのかということを調べました。
その結果、この「楽WALK」の試作機の課題がいくつか見つかりました。「楽WALK」は車輪が前に1輪、後ろに2輪あり、その全てがキャスターのように向きが変わる仕様です。ところが、この後輪の動く向きが変わることで、人が歩くときの自然な腰の動きとは逆の、歩きにくい方向に車輪が回転すると分かりました。それに対して、後輪の向きを変わらないように固定すると、歩きにくくなる動きはなくなるものの、普通の歩き方と比べて、腰の動きの回転自体も抑えられてしまい、それぞれに一長一短があると分かったのです。こうした分析結果をもとに、歩行補助機をどう改善していけばよいかを検討しました。
それから、家庭内でお年寄りが自分で操作して使える移動ロボットに関する研究もしています。お年寄りが遠隔操作することで、ロボットに何かモノを持ってきてもらうというもので、その操作方法について研究しています。具体的には、ジョイスティックのようなコントローラーではなく、手のジェスチャーをセンサで読み取ってロボットを動かすことができないかと取り組んでいます。「リープモーション」という非接触で、手の位置や指の曲がり方などを認識するセンサを使って、どういう手のジェスチャーにしたら操作しやすいか、あるいは覚えやすいかということを実験して、考察しています。目標は、高齢者でもスムーズに手のジェスチャーでロボットを操作できるようにすることです。
この研究の進捗としては、今年3月に卒業した学生が、リクライニングベッドの背中部分を起こした状態にある人がロボットを操作するには、どうするとよいかという実験をしました。ロボット自体にカメラがついていて、ロボットから見えているカメラの映像を見ながら、ベッドの上から操作することを実験していたのですが、操作方法の問題だけでなく、映像などの問題もあり、実際に使いやすいものにするには、課題がまだ多数あると分かったところです。
■研究を通して、学生にはどんなことを身に付けてほしいですか?
特に4年生の卒業研究において、当研究室では学生自身の興味あることを尊重した研究テーマの設定を勧めています。学生自身のアイデアや考えを大事にしているのです。それは同時に課題や問題を自分で発見して、その解決につながることを自分で調査し、検討する力を身に付けなければならないということでもあります。そういう力を、卒業研究を通して養ってほしいですね。
■どんなところに研究の面白さを感じますか?
私の研究室では、人間そのものの動きをセンサで測ることにも、力を入れて取り組んでいます。そのデータを活用して、ロボットに活かそうとしています。最近では、パワーアシストに興味を持っている学生が、筋肉の動きを捉える筋電センサを使って、測定しました。その学生の場合は上半身をアシストするために、腕で重いものを持ち上げたときの筋電を測って分析しています。また、捻挫など足にケガをしたときの歩行をうまくアシストしようと考えている学生もいて、今は歩行時の筋電の分析をしようと取り組んでいます。このように人の動きを実際にセンサで測って、そのデータを分析し、何か新しいことや知らなかったことが分かると、研究はすごく楽しいし面白いですよ。
■今後の展望をお聞かせください。
私がヒューマノイドロボットの歩行やロボットの運動に興味を持ったきっかけは、「人ってすごい!」と思ったことからでした。ロボットを動かすことは、思っている以上に難しいもので、動かせたとしても人のようには動きません。しかし、人は運動として難しいことを、効率的かつ自然に実現しています。もちろん、それができるようになるまでには、色々な学習をしているわけですが。そういう人間の動きや情報処理を、ロボットでもうまくできるようにしたいと思っています。それを実現できるような研究を、これからも幅広くしていきたいです。
また、今はロボットの顔の表情が少し人間らしく見えるようになってくるなど、それぞれの分野で進歩してきていると思います。とはいえ、複雑な環境で効率的に動いたり、うまく動いたりということは、まだ難しい状況です。例えば、がれきのある場所など、歩くのも難しい環境で作業できるロボットは、それ専用のロボットとして開発されていますが、ヒューマノイドロボットのような家庭でも足元の悪い場所でも動ける汎用的なロボットでできるかというと、それにはまだたくさんの研究開発が必要です。そういうことができるロボットの動きを実現することは、私の目標のひとつでもあります。
また、この研究室の研究テーマは、医療分野にかかわるようなものもありますから、機会があれば本学の医療保健学部など、他学部との共同研究もしてみたいと思っています。
■最後に、受験生?高校生へのメッセージをお願いします。
大学では、学部の卒業研究、大学院に進んだ人はそこでも研究に挑戦することになります。研究は、面白いと同時に大変なものではあります。ただ、興味を持って取り組めば、とても楽しいものですから、ぜひ色々なことに興味を持って、研究にチャレンジしてください。
また、特にロボットや機械について研究する場合、その基礎となるのは数学と物理です。加えてロボットを動かすには、どこかで必ずプログラミングが必要になります。この分野に興味のある方は、それらの科目に苦手意識を持たないよう、しっかり勉強してほしいですね。
■工学部WEB:
/gakubu/eng/index.html